近年来,人工智能系统已广泛部署于自动驾驶汽车、最后一英里配送、餐厅服务、患者筛查、医院清洁、膳食准备、建筑安全和仓库包装等领域。
据外媒报道,麻省理工学院(MIT)的工程师为机器人专家开发出一种通用设计工具,可改进自动驾驶机器人系统。该团队设计出一种优化代码,可应用于几乎所有的自动驾驶机器人系统的仿真,并可用于自动识别如何以及在何处调整系统以提高机器人的性能。
图片来源:MIT
该团队表明,该工具能够快速提高两个非常不同的自动驾驶系统的性能:一个是机器人在两个障碍物间的路径中导航,另一个是两个机器人共同移动一个沉重的箱子。
研究人员希望该全新通用优化器可以帮助加快自动驾驶系统的开发,包括步行机器人和自动驾驶车辆,柔软和灵巧的机器人,以及协作机器人团队。
倒置设计
在观察了可用于其他工程学科的大量自动化设计工具后,研究成员、麻省理工学院研究生Charles Dawson和麻省理工学院航空航天系助理教授ChuChu Fan意识到需要一个通用的优化工具。
通常,机器人专家需要首先开发仿真系统及其许多交互子系统(例如规划、控制、感知和硬件组件)来优化自动驾驶系统,然后调整每个组件的某些参数并向前运行仿真,以查看该系统在该场景中的表现。
只有在通过反复试验运行许多场景之后,机器人专家才能确定参数的最佳组合以产生所需的性能。该过程乏味、过度定制和耗时,因此Dawson和Fan决定进行改变。
研究人员们开发出一种优化框架或计算机代码,可以自动找到微调现有自动驾驶系统,以达到预期结果。
该代码的核心是基于自动微分或“autodiff”(一种在机器学习社区中开发的编程工具,最初用于训练神经网络)。Autodiff可以快速有效地“评估导数”或觉察到计算机程序中任何参数变化。Dawson和Fan正是基于autodiff编程的最新进展为自动驾驶机器人系统开发出通用优化工具。
打造更好的机器人
该团队在两个独立的自动驾驶机器人系统上测试了他们的新工具,并发现与传统的优化方法相比,该工具在实验室实验中迅速提高了每个系统的性能。
第一个系统包括一个轮式机器人,其任务是根据从在不同位置的两个信标接收到的信号,规划两个障碍物之间的路径。该团队试图找到信标的最佳位置,以便在障碍物之间形成一条清晰的路径。
他们发现新的优化器可以快速通过机器人的仿真进行反馈,并在5分钟内确定信标的最佳位置,而传统方法需要15分钟。
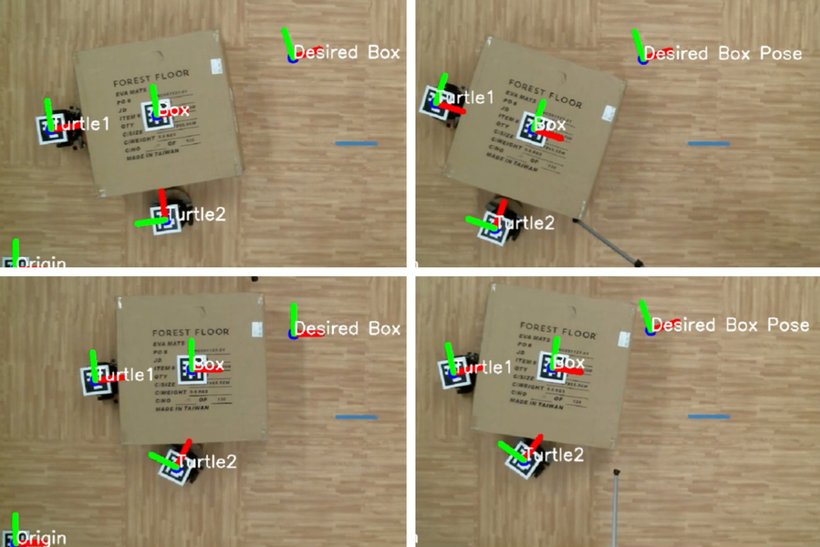
第二个系统更复杂,包括两个轮式机器人一起工作,将一个盒子推向一个目标位置。该系统的仿真包括更多的子系统和参数。尽管如此,该团队的工具还是有效地确定了机器人完成目标所需的步骤,优化过程比传统方法快20倍。
该团队提供该通用优化器下载选项,并计划进一步改进代码以应用于更复杂的系统,例如旨在与人类交互和与人类一起工作的机器人。